
Metal-Interface veille à la protection de votre vie privée : lorsque vous soumettez une demande ou posez une question, vos informations personnelles sont transmises au fournisseur concerné ou, si nécessaire, à l'un de ses responsables régionaux ou distributeurs qui pourra vous apporter une réponse directe. Consultez notre Politique de Confidentialité pour en savoir plus sur les modalités et objectifs du traitement de vos données, ainsi que vos droits relatifs à ces informations. En continuant à naviguer sur notre site, vous acceptez nos conditions générales d'utilisation.

Gaz
Article technique
Un article pour découvrir le générateur de gaz d'azote et d'oxygène pour les machines de découpe laser. Pourquoi ne pas produire son gaz directement où il est utilisé ?

Optimisez vos process
Communiqué
L’automne est synonyme de renouveau. Bystronic propose à ses clients des solutions qui les rendent encore plus compétitifs: de la machine de découpe laser ou de la presse plieuse autonome en passant par la solution d’automatisation jusqu’à la Smart Factory complète. «World Class Manufacturing» pour chaque entreprise d’usinage de tôles.

Optimisez vos process
Communiqué
la machine de découpe BP-H COMBI intègre les avantages de la technologie du jet d'eau et du plasma HD en une seule machine

Tôles / produits plats
Article technique
L’anodisation est un procédé de traitement de surface qui consiste à créer une couche d’oxyde protectrice en surface de l’aluminium ou du titane. L’anodisation n’est pas un procédé de revêtement, mais un traitement de conversion, c’est-à-dire qu’il n’y a pas apport de matière en surface, mais une transformation chimique : il n’y a donc pas ou peu de modification des côtes initiales.
DAO-CAO
Article technique
La conception est un élément essentiel en tôlerie pour produire des pièces justes. Chaque production part du 2 dimensions (une tôle) pour aller vers le 3D. Or, la conception d'un ensemble est d'abord en 3 dimensions...

Découpe laser
Communiqué
Une puissance accrue grâce à une technologie de pointe et un concentré de savoir-faire en matière d’automatisation: le nouveau système de chargement et déchargement ByTrans Modular avec manipulation intelligente des pièces convient à toute configuration de commande et optimise la puissance de la machine de découpe laser.
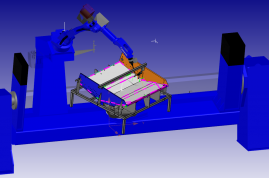
Robot de soudage
Article technique
Automatisation de la soudure : découvrez l'expérience de l'installation d'un robot de soudure associé un logiciel de programmation hors ligne pour produire des machines pour l'agriculture.

Technologies de soudage
Article technique
Souder des tubes avec la technologie de la découpe orbital : à découvrir dans cet article !

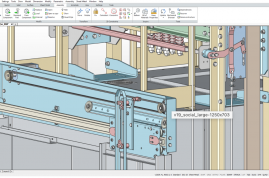
Soudage - Programmation hors ligne de robots
Communiqué
La programmation hors ligne (PHL) est une méthode de programmation robots « en temps masqué ». Les mouvements du robot sont simulés sur l’écran d’un poste de travail déporté. Cette méthode s’appuie sur les fichiers 3D généraient par les logiciels de CAO lors de la conception de vos pièces à souder.
Merci ! Votre demande a bien été envoyée.